Publications
2026

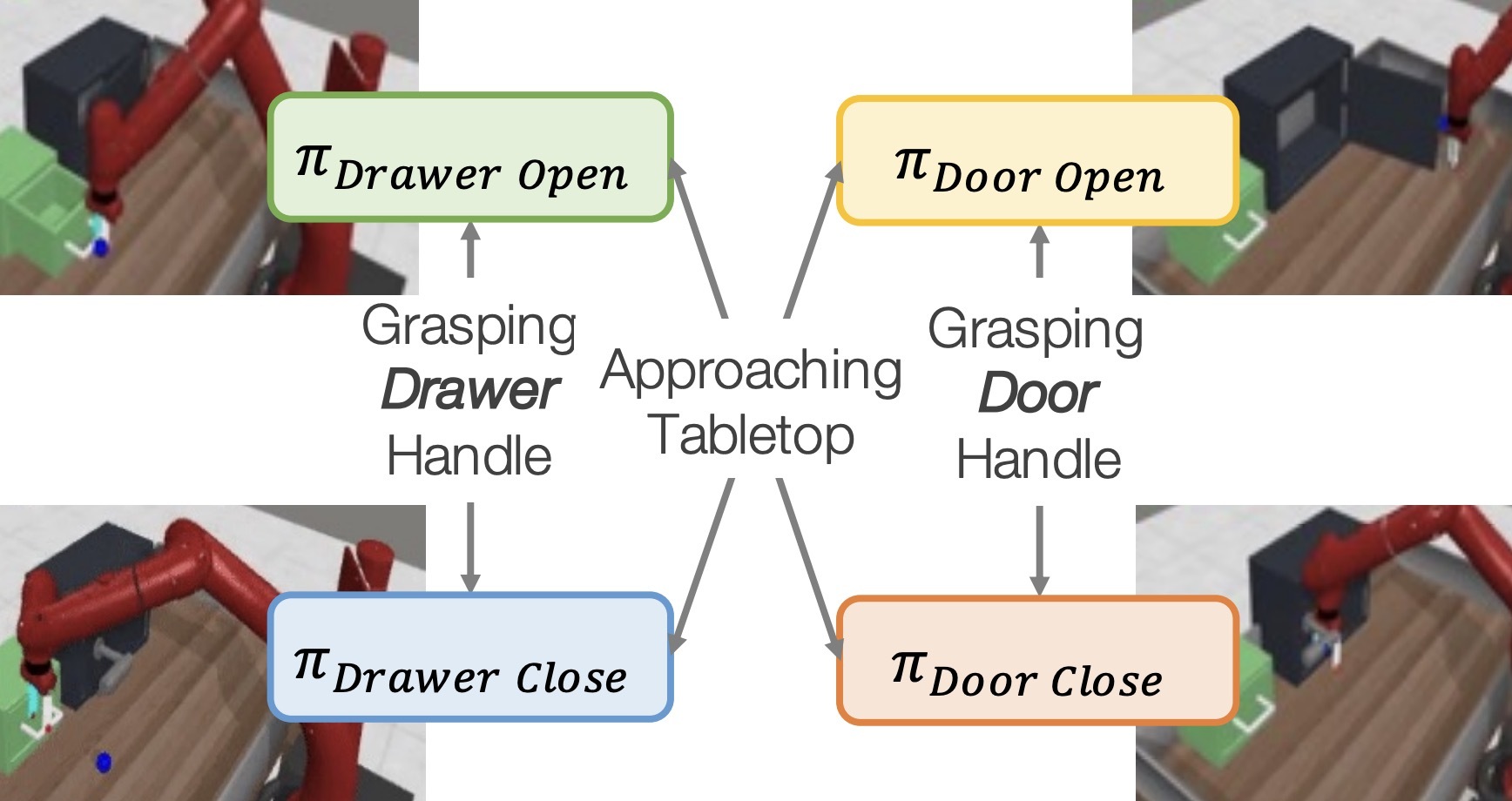
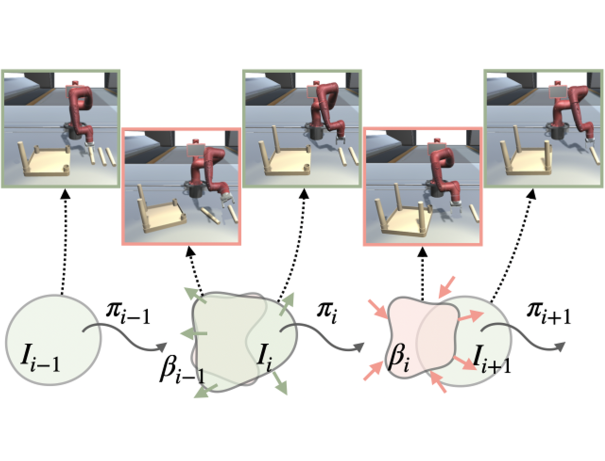
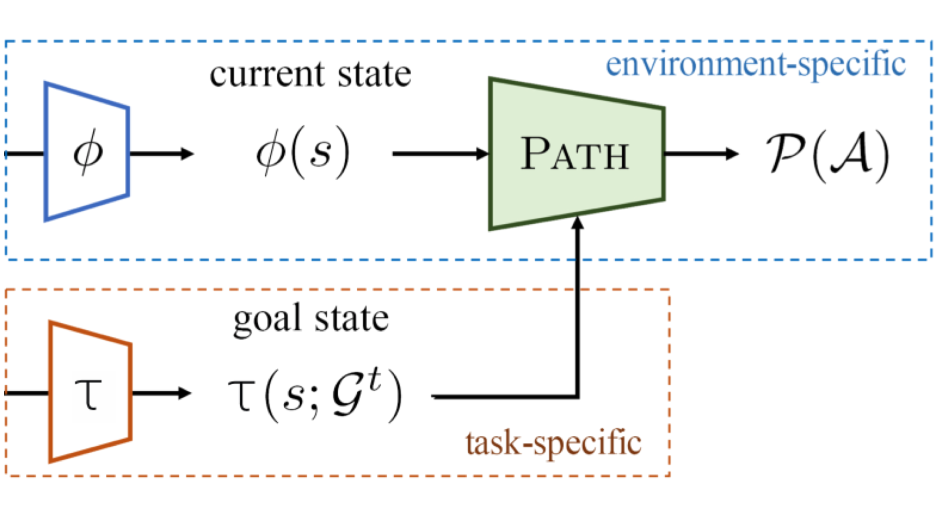
RACE: Time Optimal Execution of Action Chunk Policies Beyond Demonstration Speed
ICLR 2026
[PDF]
2025
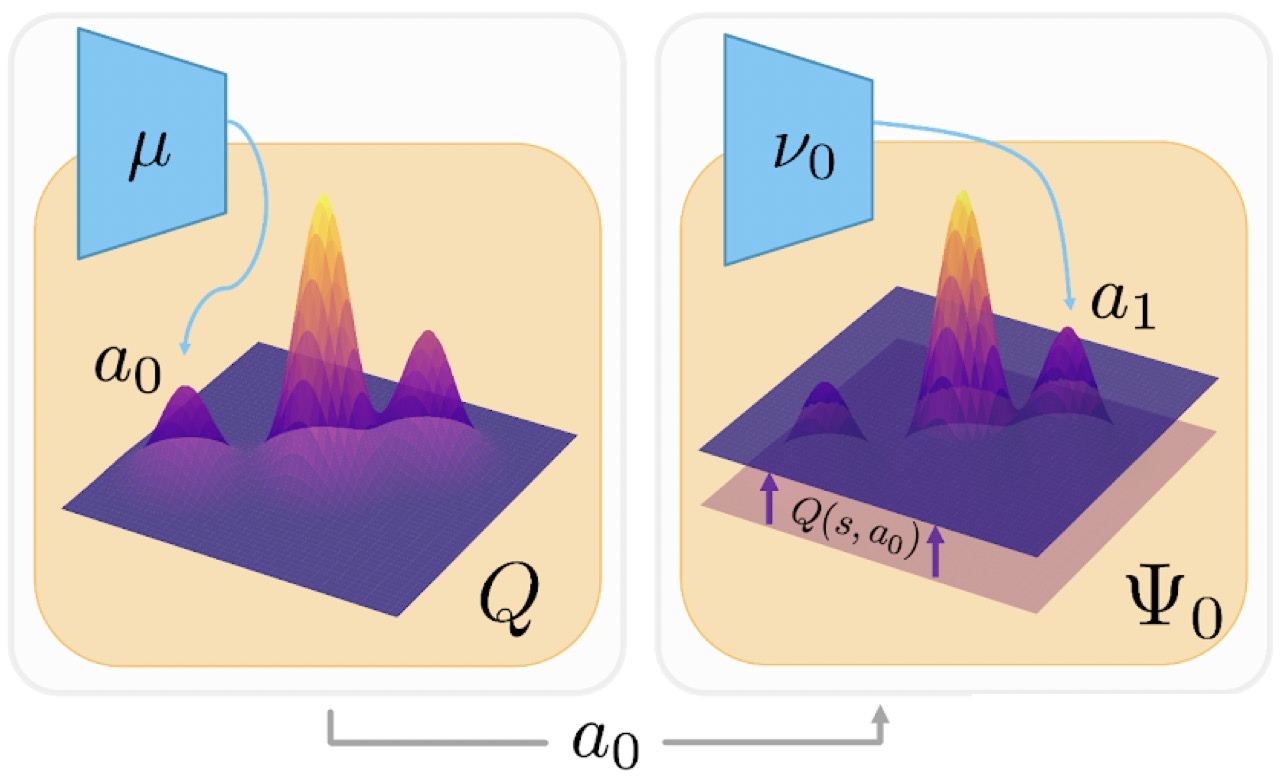
Mitigating Suboptimality of Deterministic Policy Gradients in Complex Q-functions
RLC 2025 (Outstanding Paper Award on Empirical Reinforcement Learning Research)
[PDF]
2024
2023

2022
2021

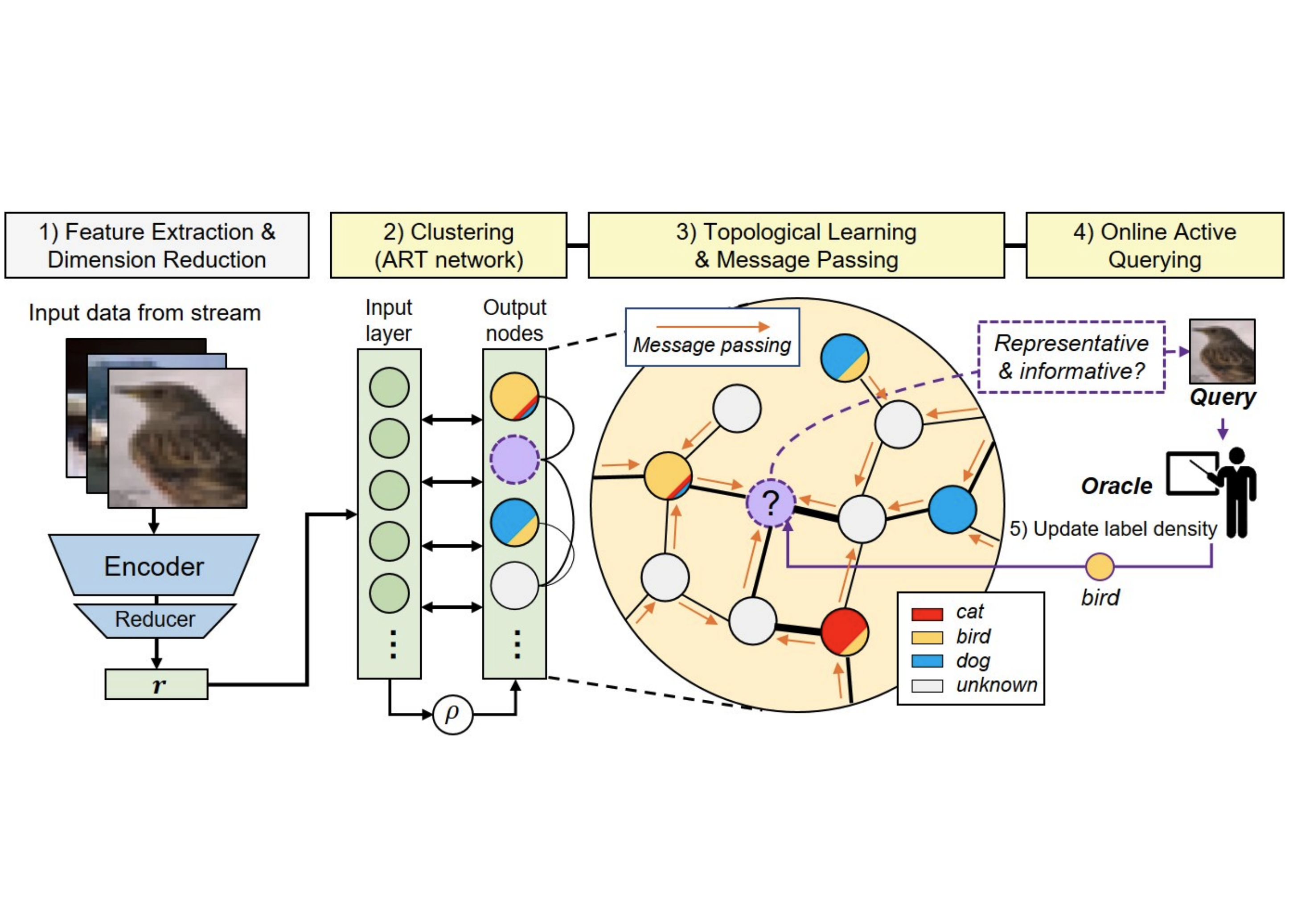
Message Passing Adaptive Resonance Theory for Online Active Semi-supervised Learning
ICML 2021
[PDF]
2020

Generalization to New Actions in Reinforcement Learning
2019
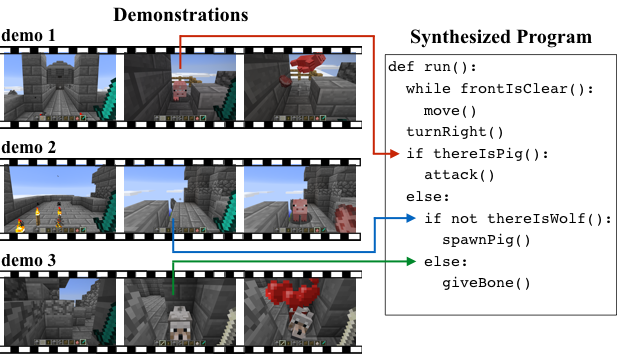
To Follow or not to Follow: Selective Imitation Learning from Observations
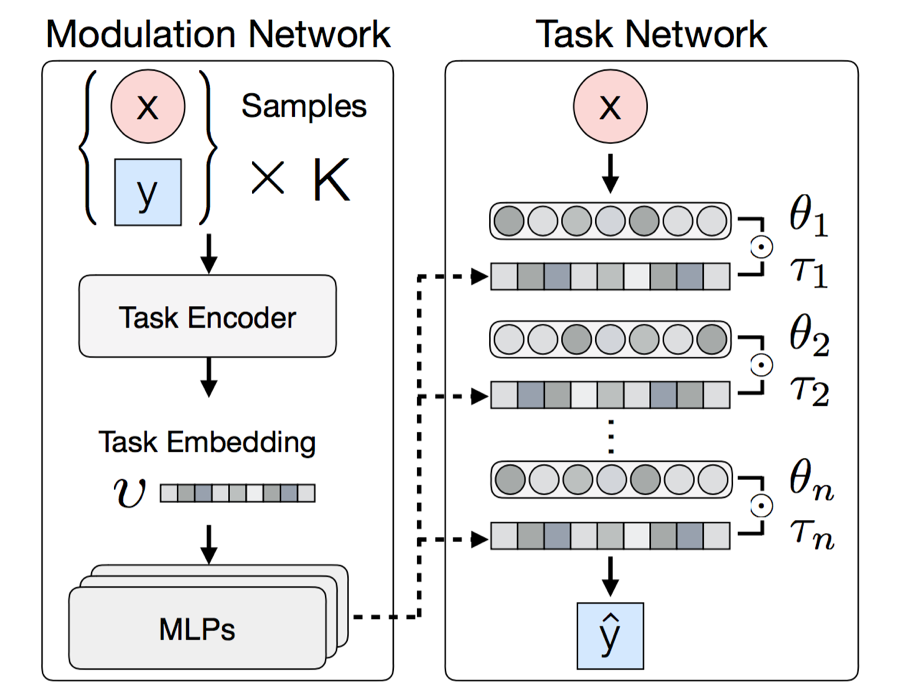
Multimodal Model-Agnostic Meta-Learning via Task-Aware Modulation

Scaling Simulation-to-Real Transfer by Learning Composable Robot Skills
ISER 2018 (IJRR 2020)
[PDF]
2018
Learning and Using the Arrow of Time
CVPR 2018
[PDF]
Universal Agent for Disentangling Environments and Tasks
ICLR 2018
[PDF]
2017
Multi-Modal Imitation Learning from Unstructured Demonstrations using Generative Adversarial Nets
NIPS 2017
[PDF]
Unsupervised Visual-Linguistic Reference Resolution in Instructional Videos
CVPR 2017
[PDF]

Knowledge Acquisition for Visual Question Answering via Iterative Querying
CVPR 2017
[PDF]

2016

High-Fidelity Facial and Speech Animation for VR HMDs
SIGGRAPH Asia 2016
[PDF]
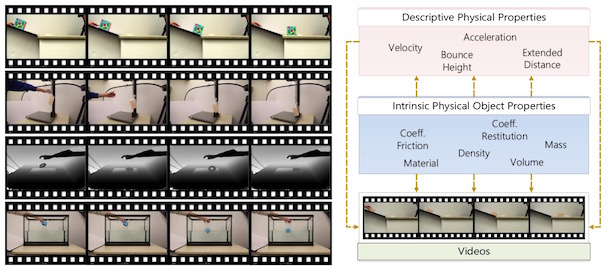
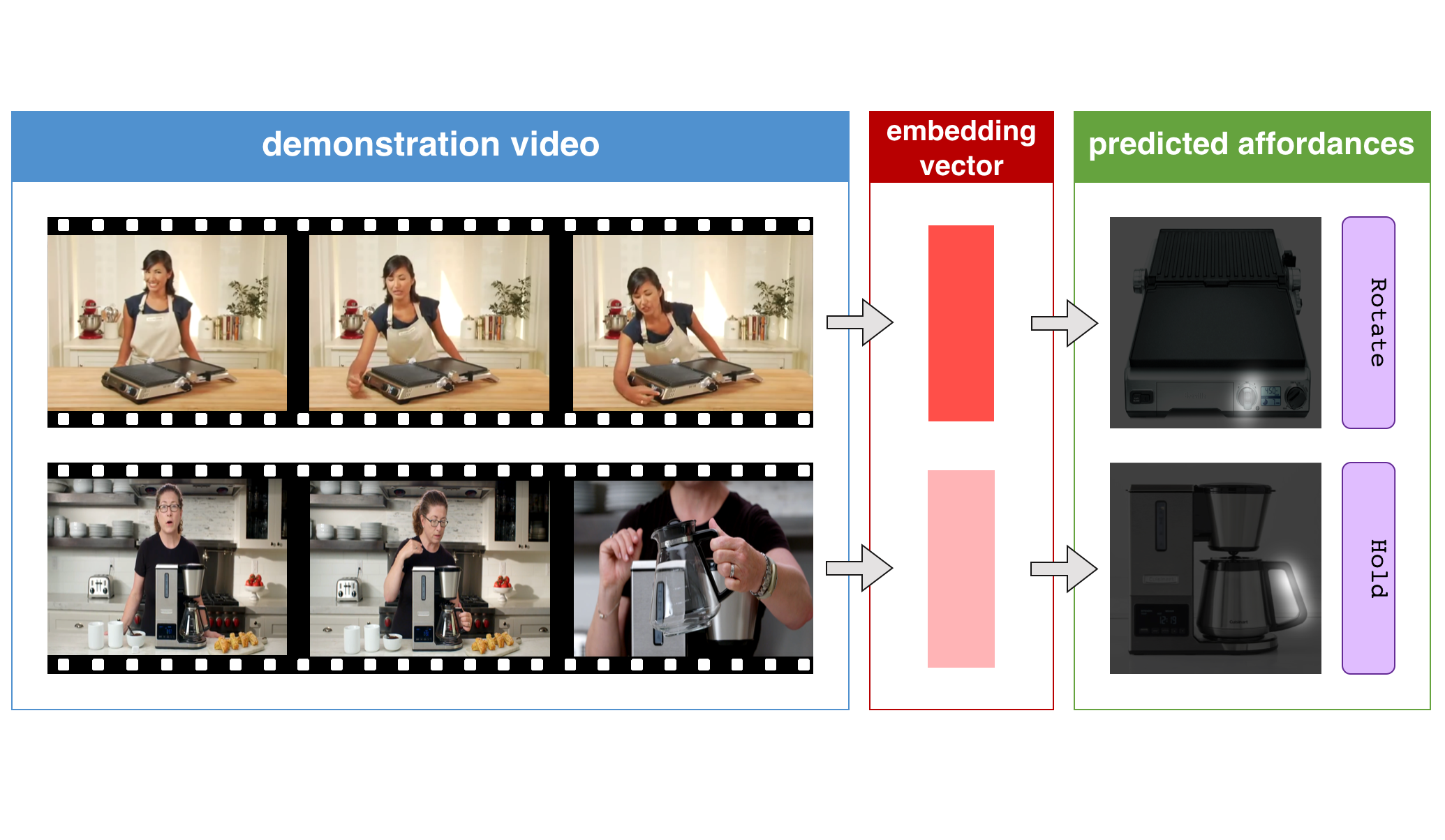
Physics 101: Learning Physical Object Properties from Unlabeled Videos
BMVC 2016
[PDF]
Before 2016
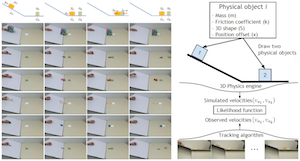
Galileo: Perceiving Physical Object Properties by Integrating a Physics Engine with Deep Learning
NIPS 2015
[PDF]

Discovering States and Transformations in Image Collections
CVPR 2015
[PDF]
FPM: Fine pose Parts-based Model with 3D CAD models
ECCV 2014
[PDF]

Looking Beyond the Visible Scene
ECCV 2014
[PDF]

Parsing IKEA Objects: Fine Pose Estimation
ICCV 2013
[PDF]

Sketch Tokens: A Learned Mid-level Representation for Contour and Object Detection
CVPR 2013
[PDF]
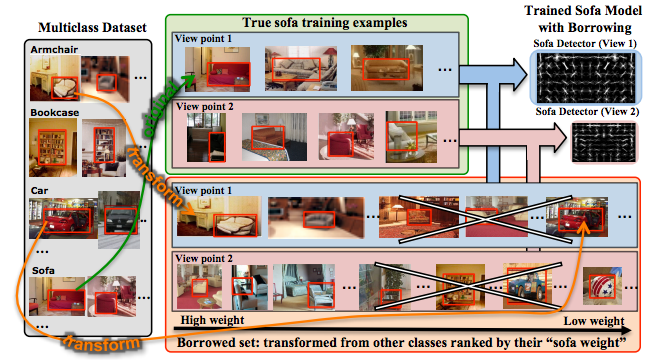
Transfer Learning by Borrowing Examples for Multiclass Object Detection
NIPS 2011
[PDF]
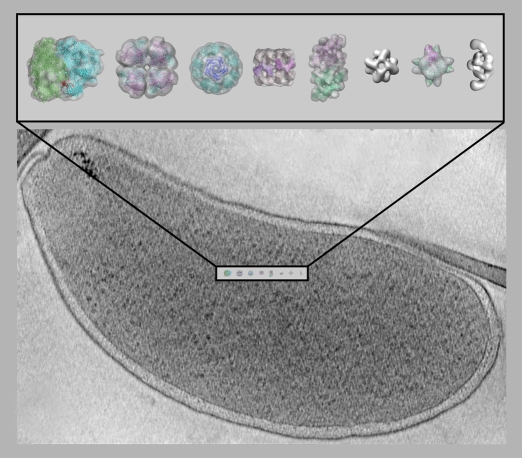
Experimental Evaluation of Support Vector Machine-based and Correlation-based Approaches to Automatic Particle Selection
Journal of Structural Biology 2011. doi:10.1016/j.jsb.2011.05.017
[PDF]
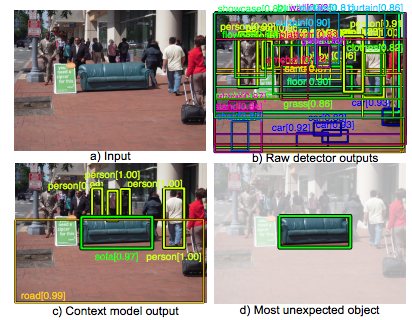
Exploiting Hierarchical Context on a Large Database of Object Categories
CVPR 2010
[PDF]

Context by Region Ancestry
ICCV 2009
[PDF]
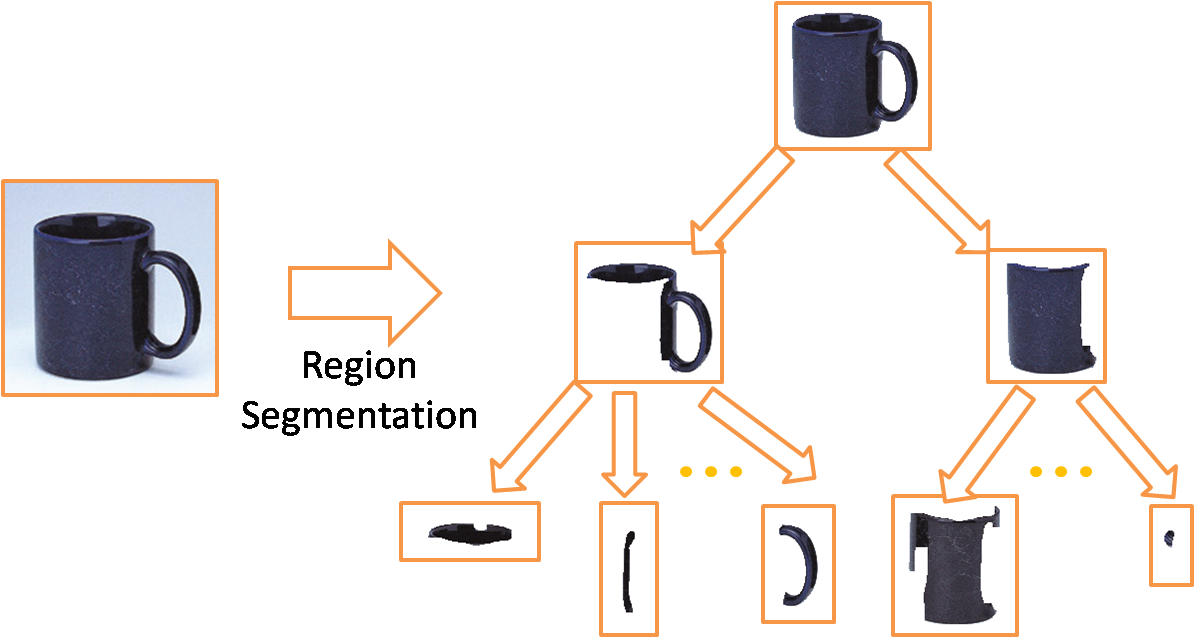
Recognition using Regions
CVPR 2009
[PDF]
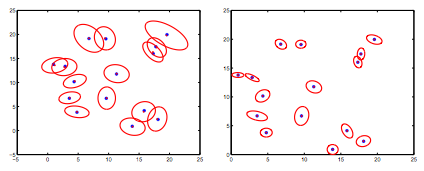
A Distributed Message Passing Algorithm for Sensor Localization
ICANN 2007
[PDF]